أعلنت شركة Apera AI Inc. هذا الأسبوع عن تحديثات جديدة لمنصتها Apera Forge، وهي استوديو تصميم وتدريب ذكاء اصطناعي قائم على الويب، يهدف إلى تبسيط مشاريع الروبوتات الموجهة بالرؤية رباعية الأبعاد (4D Vision).
يشمل الإصدار الأحدث ميزات جديدة تدعم تصميم خلايا روبوتية متقدمة، وتكوينات الكاميرات المثبتة على نهاية الذراع (EOAT)، بالإضافة إلى دعم المحاكاة والتدريب الكامل لتطبيقات إزالة الترفيف (De-racking).
“نمنح الروبوتات الصناعية رؤية 20/20 لتحقيق مستويات جديدة من الاعتمادية والإنتاجية في التصنيع”، صرّح بذلك سينا أفروز، المؤسس والرئيس التنفيذي لشركة Apera AI. وأضاف:
“هذا الإصدار يمثل مرحلة جديدة لمنصة Forge، حيث لا نوسّع فقط واقعية ومرونة المحاكاة لتصميم الخلايا المتقدمة، بل نمكّن فرق الأتمتة من تدريب نماذج ذكاء اصطناعي قوية لإزالة الترفيف وتكوينات الرؤية EOAT بشكل مستقل.”
حول Apera Forge:
Apera Forge هي منصة محاكاة وتدريب ذكاء اصطناعي بدون كود تعمل من خلال المتصفح، وتتيح للمصنّعين ومهندسي التكامل تصميم وتقييم تطبيقات الروبوتات الموجهة بالرؤية دون الحاجة إلى استثمار أولي في الأجهزة.
تقول الشركة إن المنصة تتيح محاكاة الروبوت، والممسك، والكاميرا، وهندسة الأجزاء، وبيئة الخلية خلال دقائق، مما يقلص وقت العمل الذي كان يستغرق أسابيع أو شهورًا إلى ساعات قليلة فقط.
كما تتيح نماذج الذكاء الاصطناعي المدربة في Forge تحقيق دقة تتجاوز 99.9% في التعرف على الأجسام وتنفيذ المهام. وتدّعي Apera AI أنها قادرة على تسليم برامج الرؤية الكاملة خلال 24 إلى 48 ساعة جاهزة للتنفيذ في الموقع.
قدرات تصميم الخلايا المتقدمة
أوضحت Apera AI أن الإصدار الجديد يشمل دعمًا لتصميم خلايا روبوتية بمرونة أعلى، من خلال تحسين وضع الكاميرات، مواضع الصناديق، وإدراج عوائق متعددة لمحاكاة أكثر دقة للبيئة الحقيقية.
يمكن للمستخدمين الآن:
-
تحديد مواضع الكاميرات والصناديق بشكل حر.
-
استخدام ملفات CAD لخلايا مرجعية لتصور وتوسيع الخلية بدقة.
-
الاستفادة من ميزة Obstacle Autopilot المتكاملة، لتحسين التنقل الآلي وتفادي الاصطدامات داخل المحاكاة.
كما تدعم المنصة استيراد تكوينات خلايا Apera Vue، بما في ذلك الصناديق، مناطق البحث، العوائق، الطاولات، والكاميرات المعايرة.
الرؤية على نهاية الذراع EOAT وإزالة الترفيف
تدعم Forge الآن الرؤية المثبتة على نهاية الذراع، المعروفة باسم Eye-in-Hand Vision، وهو ما يبسّط عملية تصميم أنظمة إزالة الترفيف حيث تكون الكاميرات مثبتة مباشرة على أدوات الروبوت النهائية.
يمكن للمستخدمين:
-
معاينة موضع الكاميرا بدقة داخل المحاكاة.
-
التأكد من زاوية الرؤية المناسبة دون عوائق.
-
ضبط موضع الكاميرا تلقائيًا للحصول على رؤية مثالية لقطع العمل.
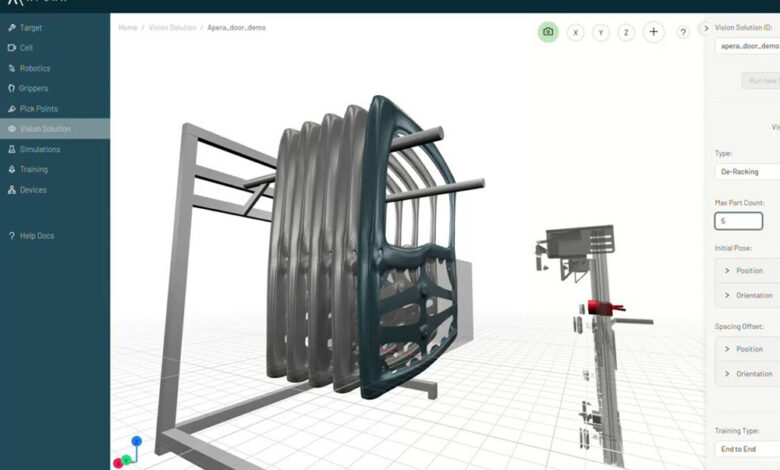
كما تدعم Forge المحاكاة والتدريب الكامل لتطبيقات إزالة الترفيف، حيث تكون المسافات والاتجاهات والبنية الرفوفية ضرورية للتعرف الفعال على الأجزاء والتقاطها.
يمكن للمستخدمين تحديد معلمات إزالة الترفيف بدقة، مثل:
-
المواضع الابتدائية.
-
محاور الرف.
-
تباعد الأجزاء.
-
عدد القطع المراد التعامل معها.
توفير في الوقت والتكاليف
ذكرت الشركة أن تدريب نماذج الرؤية بالذكاء الاصطناعي في Forge دون الحاجة إلى دعم من مهندسي Apera يمكن أن يوفّر وقتًا كبيرًا للمصنّعين ومهندسي التكامل.
“تطبيق إزالة الترفيف شائع جدًا في قطاع السيارات”، بحسب جيمي ويستيل، مدير الهندسة في Apera AI.
“بفضل رؤية 4D التي نقدمها والتي تُستخدم في أكبر 6 شركات تصنيع سيارات في أمريكا الشمالية، يمكّن هذا التحديث فرق الصيانة من نشر أنظمة روبوتية موجهة بالرؤية بسرعة عالية للتعامل مع أغطية السيارات، الأبواب، الألواح الجانبية، وغيرها من الأجزاء المخزنة على الرفوف.”
رؤية Apera المستقبلية
تهدف Apera AI إلى زيادة إنتاجية المصانع من خلال تمكين الروبوتات برؤية تحاكي الرؤية البشرية، مدعومة بالذكاء الاصطناعي، مما يؤدي إلى تحسينات كبيرة في السرعة والدقة.
وأشارت الشركة إلى أن برامجها قادرة على التعامل مع تطبيقات معقدة مثل:
-
التقاط القطع من الصناديق (bin picking).
-
الفرز والتغليف.
-
إزالة الترفيف.
-
التجميع الآلي.