يُعد برمجة الروبوتات الصناعية عملية مرهقة تتطلب عادة استخدام وحدات التعليم اليدوي (Teach Pendants) أو أدوات غير متصلة وتجارب متكررة. ويزداد الأمر تعقيدًا عند تنسيق عدة روبوتات في بيئة مشتركة، حيث تزداد احتمالية حدوث التصادمات وانخفاض الكفاءة. ومع وجود أكثر من 4.3 مليون روبوت صناعي قيد الاستخدام عالميًا، ما زال وقت البرمجة يمثل عائقًا رئيسيًا أمام توسيع نطاق الأتمتة.
دراسة حديثة نُشرت في مجلة Science Robotics تحت عنوان “RoboBallet: Planning for Multi-Robot Reaching with Graph Neural Networks and Reinforcement Learning” تقترح اتجاهًا جديدًا. فقد طوّر باحثون من Google DeepMind Robotics وIntrinsic وجامعة كوليدج لندن نموذج ذكاء اصطناعي يستخدم التعلم المعزز (Reinforcement Learning) والشبكات العصبية الرسومية (GNNs) لتوليد خطط حركة خالية من التصادم لعدة روبوتات تعمل في مساحات مشتركة.
تاريخيًا، كانت الخوارزميات الكلاسيكية لتخطيط الحركة قادرة على إنتاج مسارات موثوقة لروبوت واحد. لكن مع زيادة عدد الروبوتات في بيئة ضيقة، يصبح الأمر حسابيًا أكثر صعوبة، ما يضطر المهندسين إلى تعديل المسارات يدويًا لتفادي الأخطاء. النموذج الجديد يهدف إلى أتمتة معظم هذه العملية.
شركة Intrinsic، المنبثقة عن مختبر X التابع لشركة Alphabet عام 2021، تسعى منذ تأسيسها إلى جعل الروبوتات الصناعية أكثر سهولة في البرمجة والتوسع. وفي عام 2022، استحوذت على مؤسسة Open Source Robotics Foundation، المطورة لنظام ROS الشهير، مما عزز التزامها بدعم مجتمع الروبوتات وتطوير أدوات أذكى للأتمتة.
يعتمد النموذج على تدريب GNN باستخدام ملايين السيناريوهات الاصطناعية. حيث يُمثل كل روبوت ومهمة وعائق كعُقدة في رسم بياني، بينما تحدد الحواف العلاقات فيما بينها. من خلال التعلم بالتجربة والخطأ، يتعلم النموذج إنشاء مسارات آمنة يمكن تعميمها على بيئات جديدة غير مألوفة. وبمجرد التدريب، يحتاج النظام فقط إلى ملفات CAD ووصف عام للمهمة لتوليد خطط الحركة دون الحاجة إلى برمجة يدوية.
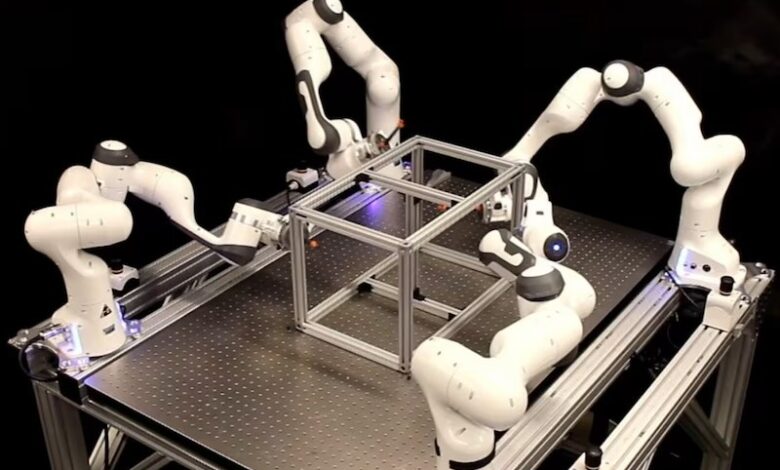
أظهرت التجارب المعملية أن النموذج يولد خططًا تصلح لما يصل إلى ثمانية روبوتات خلال ثوانٍ قليلة، وغالبًا ما يحقق حلولًا شبه مثالية. ووفقًا لـIntrinsic، حسّن النموذج جودة المسارات بنسبة 25% مقارنة بالطرق التقليدية، كما أظهر قدرة على التوسع، حيث انخفض وقت تنفيذ المهام بمعدل 60% عند الانتقال من أربعة إلى ثمانية روبوتات.
الميزة اللافتة تكمن في قدرة النموذج على التعامل مع “حزم من المهام” دون الحاجة لتعليمات تفصيلية، إذ يحدد تلقائيًا تسلسل الأفعال والمسارات المناسبة. وبفضل طريقة تمثيل العلاقات داخل بيئة العمل، يمكن للنظام التكيف مع سيناريوهات جديدة دون إعادة تدريب أو تدخل بشري.
ويتوقع فريق RoboBallet أن يسهم هذا النهج في تقليل وقت البرمجة، وزيادة مرونة أنظمة الروبوتات، وتسريع التكيف مع تغييرات التصميم أو الطوارئ التشغيلية. كما يشير الباحثون إلى أن دمج هذه التقنية مستقبلًا مع أنظمة الإدراك المعتمدة على الذكاء الاصطناعي قد يمكّن الروبوتات من إعادة التخطيط الفوري استجابة للتغيرات الديناميكية، مما يقلل من فترات التوقف ويعزز الإنتاجية.